Conversation
Fahim Farook
f
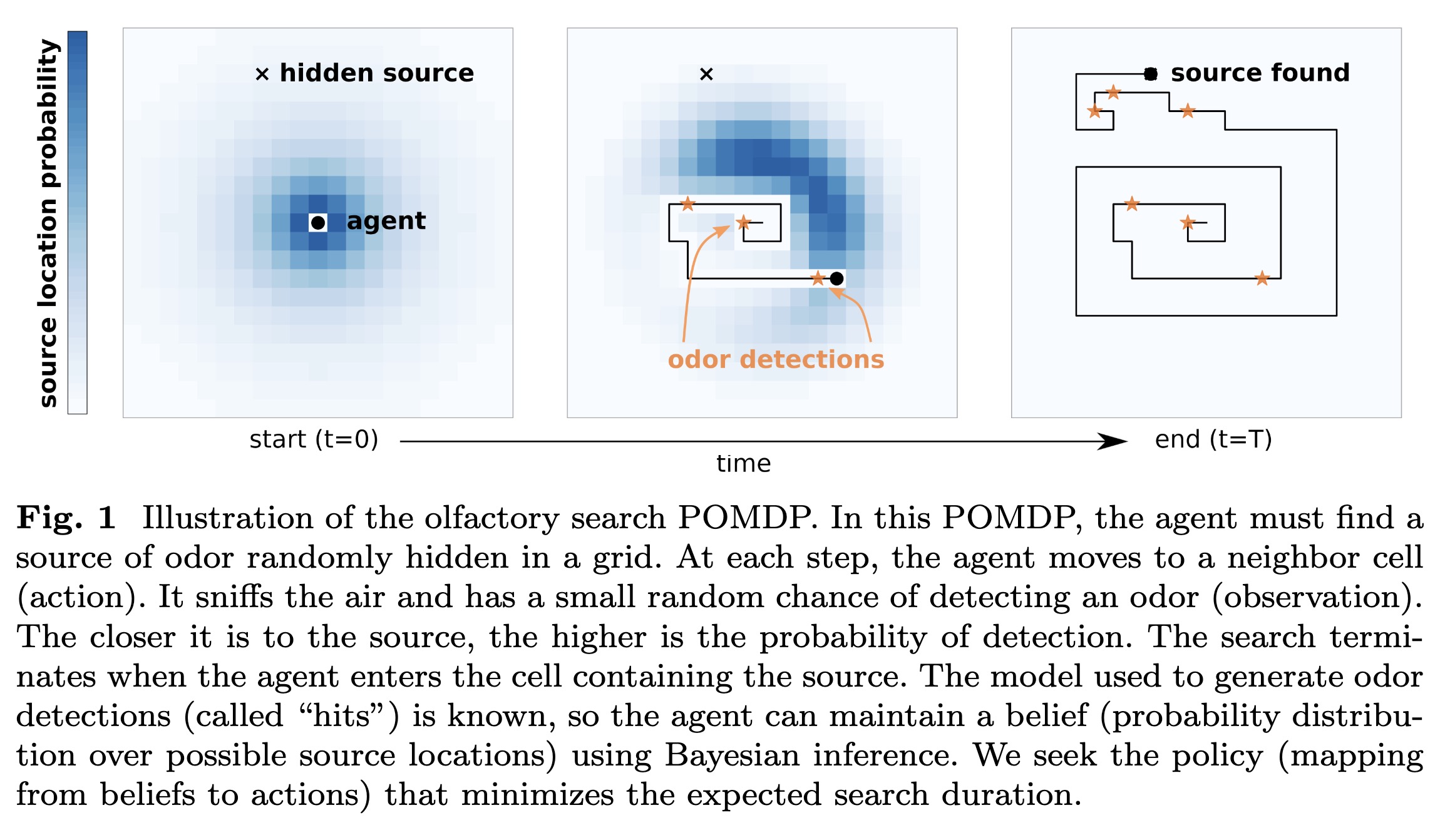
"Deep reinforcement learning for the olfactory search POMDP: a quantitative benchmark" — Using deep reinforcement learning to search for a source of odor in turbulence, as applicable to sniffer robots.
Paper: https://arxiv.org/abs/2302.00706
#NewPaper #Robotics #DeepLearning
<<Find this useful? Please boost so that others can benefit too 🙂>>
Illustration of the olfactory s…
Paper: https://arxiv.org/abs/2302.00706
#NewPaper #Robotics #DeepLearning
<<Find this useful? Please boost so that others can benefit too 🙂>>
Illustration of the olfactory s…
 0
0
 0
0
 0
0
Fahim Farook
f
@AngelaPreston My guess would be that the wrong course was dictated by the randomness — it took one step away from the source and then kept making new turns randomly trying to find a stronger smell “signal”?
0
0
0
Fahim Farook
f
@AngelaPreston Yes, I’m not sure if I interpreted it correctly either 🙂 I was going by the middle image where I assumed that the strength of the blue colour indicated the strength of the smell …
But that didn’t seem to totally gel with the third image in terms of it going off course yet again … But since the third image doesn’t have the smell overlay (if that’s indeed what it is …) I can’t be sure that it didn’t again land on a cell with no smell and so went off course again due to the randomness …
But that didn’t seem to totally gel with the third image in terms of it going off course yet again … But since the third image doesn’t have the smell overlay (if that’s indeed what it is …) I can’t be sure that it didn’t again land on a cell with no smell and so went off course again due to the randomness …
0
0
0