Conversation
Fahim Farook
f
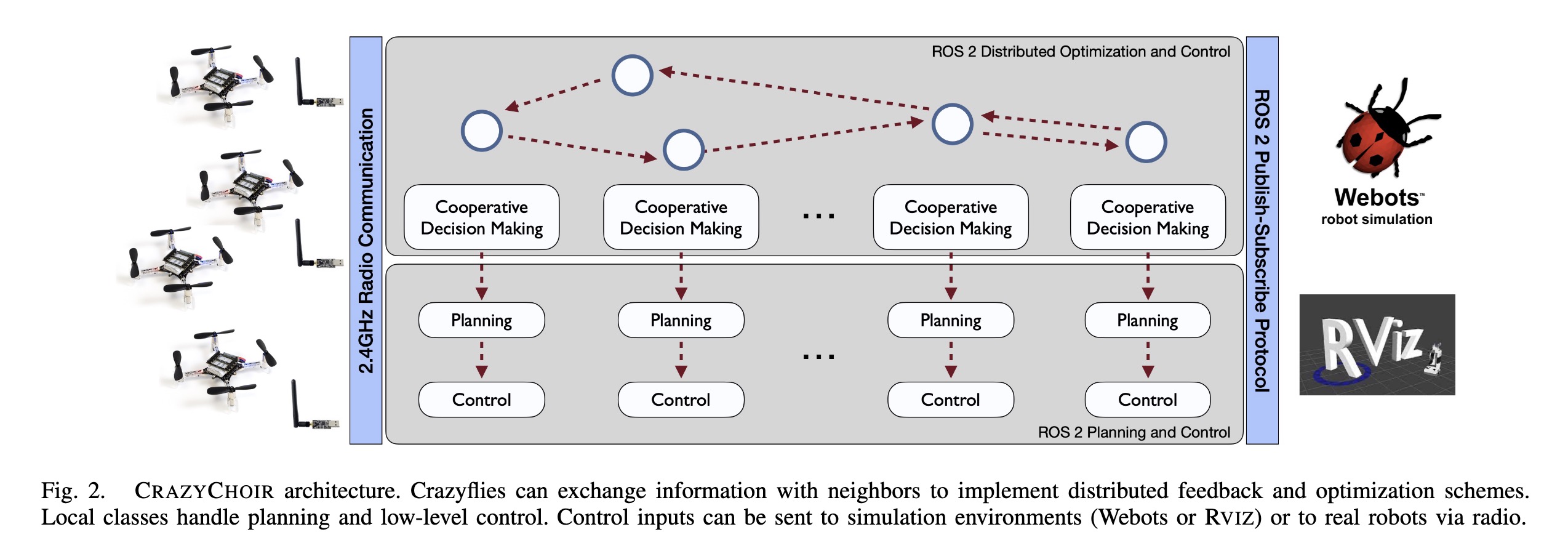
"CrazyChoir: Flying Swarms of Crazyflie Quadrotors in ROS 2" — A modular Python framework based on the Robot Operating System (ROS) 2 which provides a comprehensive set of functionalities to simulate and run experiments on teams of cooperating Crazyflie nano-quadrotors.
Paper: https://arxiv.org/abs/2302.00716
#NewPaper #Robotics
<<Find this useful? Please boost so that others can benefit too 🙂>>
CRAZYCHOIR architecture. Crazyf…
Paper: https://arxiv.org/abs/2302.00716
#NewPaper #Robotics
<<Find this useful? Please boost so that others can benefit too 🙂>>
CRAZYCHOIR architecture. Crazyf…
 0
0
 1
1
 0
0