Conversation
Fahim Farook
f
"A Fast Feature Point Matching Algorithm Based on IMU Sensor. (arXiv:2301.10293v1 [cs.CV])" — An algorithm using the inertial measurement unit (IMU) to optimize the efficiency of image feature point matching, in order to reduce the time consumed when matching feature points in simultaneous localization and mapping (SLAM).
Paper: http://arxiv.org/abs/2301.10293
#AI #CV #NewPaper #DeepLearning #MachineLearning
<<Find this useful? Please boost so that others can benefit too 🙂>>
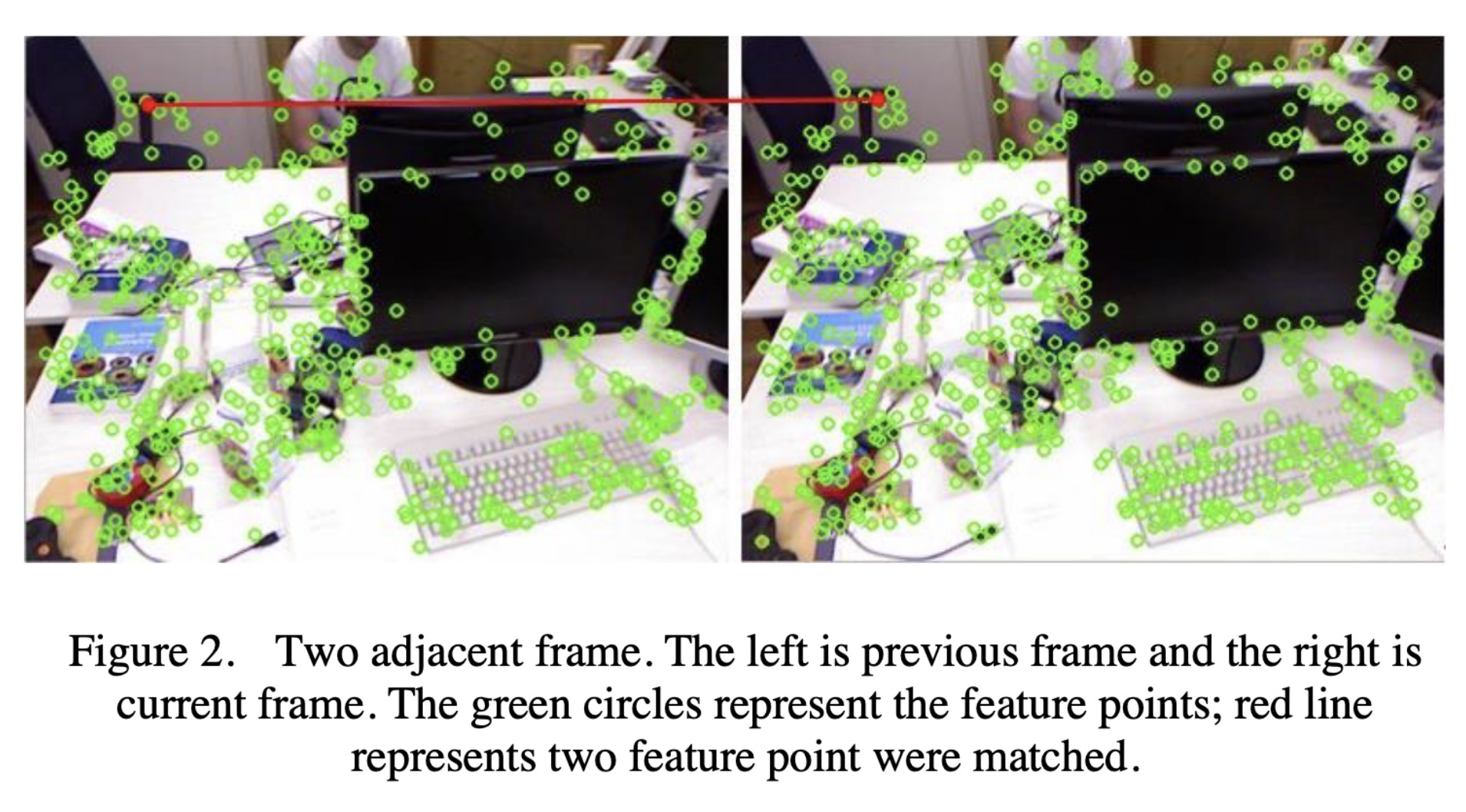
Two adjacent frames. The left i…
Paper: http://arxiv.org/abs/2301.10293
#AI #CV #NewPaper #DeepLearning #MachineLearning
<<Find this useful? Please boost so that others can benefit too 🙂>>
Two adjacent frames. The left i…
 0
0
 1
1
 1
1